軟體微機器人因其形態可變性��、物理適應性、交互友好性而得到廣泛關注�����,在癌癥靶向治療等個性化先端醫療領域展現出巨大潛力��。目前,微機器人通過搭載特定物質并在光�����、電���、磁等物理場刺激下運動�、形變可以完成特定任務。光和磁場都可以作為非接觸的遠程控制形式����,用于控制某些運動行為,在微機器人和生物醫療領域具有廣闊的應用前景���。
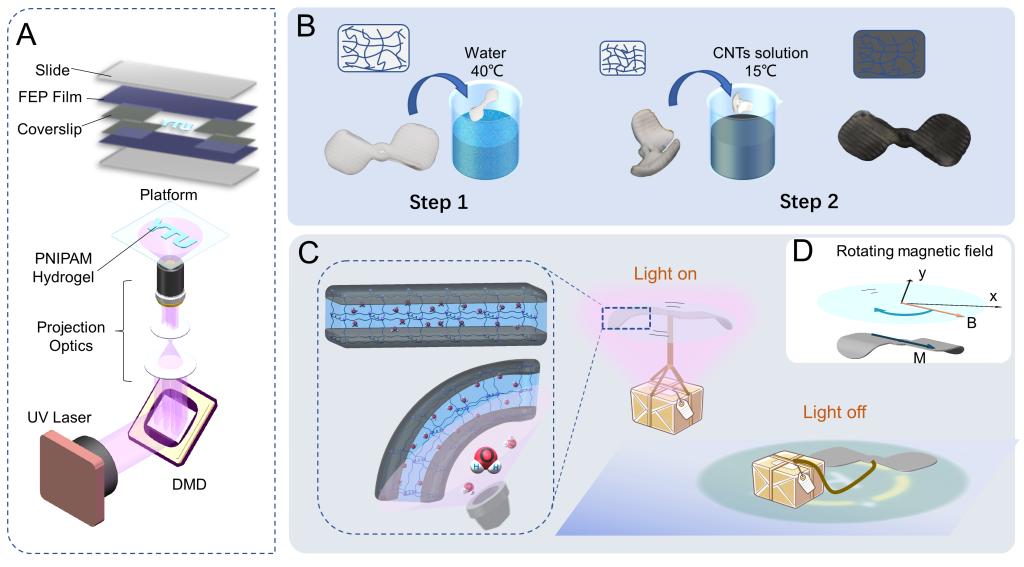
圖1光磁耦合驅動的可控變距微螺旋槳機器人示意圖
近日,煙臺大學機電汽車工程學院楊文廣帶領科研團隊在跨學科一區TOP期刊SENSORS AND ACTUATORS B-CHEMICAL上發表題為《Bio-inspired propeller robot with controllable pitch driven by magnetic and optical coupling field》的學術論文���。該工作受仿生思想的啟發�,將直升機現有的驅動形式應用在微型機器人中���,制造了一種光可控變距微螺旋槳機器人���。在合成的光響應復合水凝膠內部封裝磁性材料���,并通過磁場發生器為微螺旋機器人提供旋轉動力�。通過氙燈光源的照射來調節槳距,使螺旋槳變換不同的運動形式��?�?煽刈兙嗦菪龢獧C器人為微型水下航行器和微飛行器的設計提供了一種新穎的思路���。
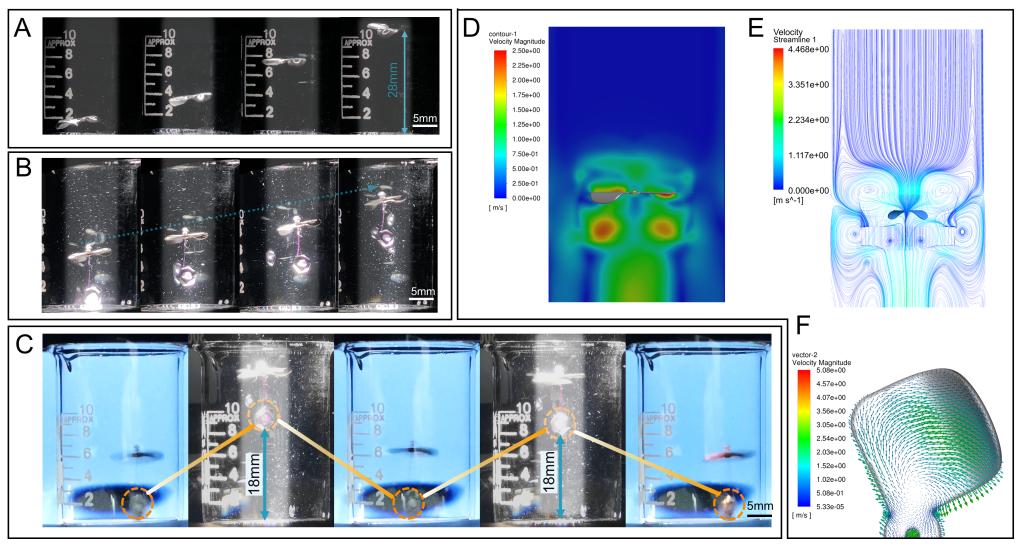
圖2微螺旋槳的光可控飛行和有限元分析
楊文廣副教授為該論文的通訊作者�����。該科研團隊始終致力于小尺寸機器人的研究,針對毫米級�����、微米級機器人開展了一系列研究�,在磁驅動毫米機器人、光驅動毫米機器人�����、熱驅動毫米機器人��、混合驅動機器人等方面取得了一系列研究成果。此外�����,團隊論文《Recent advance in surface modification for regulating cell adhesion and behaviors》于2023年1月入選ESI高被引論文��,體現了國內外學者對我院教師科研成果的廣泛關注和認可�。
相關工作得到了國家自然科學基金��、山東省自然科學基金�����、遼寧省科技廳機器人學國家重點實驗室聯合基金、煙臺大學研究生科研創新基金的資助��。
原文鏈接:https://doi.org/10.1016/j.snb.2023.133509